Система, що розвантажує оператора
і повертає фокус на місію
Оператор НРК працює в умовах обмеженого часу, шуму, втоми й багатозадачності. T700 GCS знімає когнітивне навантаження — інфраструктура, налаштування й моніторинг зібрані в одному місці, щоб увага залишалася на завданні, а не на інструментах.
У класичній схемі оператор одночасно тримає в голові: де відкрити відео, де подивитися батарею, як зайти на борт для зміни параметра, чи живий зв'язок з автопілотом. Mission Planner і QGroundControl з'явилися насамперед для пілотування літальних апаратів — не як робоче місце для керування наземною платформою з відео, енергетикою й власними модулями. Кожен такий контекстний стрибок — це мікропауза в місії.
T700 GCS побудована навколо іншого принципу: один робочий простір, де керування, відео, карта, телеметрія, зв'язок і діагностика вже з'єднані між собою. Оператор не збирає стек перед виїздом і не «латать» його в полі — він бачить ситуацію, приймає рішення і діє.
Для командира зміни це означає передбачувану поведінку екіпажу. Для техніка — можливість налаштувати платформу дистанційно. Для виробника — модульну інтеграцію турелей, РЕБ і сторонніх систем без окремого GCS під кожну модифікацію. Для оператора — менше рутини й більше концентрації на тому, заради чого виникла місія.
Блок керування
Центральний екран оператора — сторінка «Керування». У тулбарі — режим польоту, стан батареї, затримка зв'язку з наземною станцією та кнопки ARM / DISARM. Зліва — телеметрія в реальному часі: курс, крен, тангаж, швидкість, якість з'єднання з автопілотом, сесії і лог подій. У центрі — карта з позицією платформи або відео з камер; перемикання між передньою, задньою, сплітом і мапою — одним рядом кнопок. У блоці «Функції» — кастомні кнопки з кількома положеннями для фар, гальм, сервоприводів і інших вузлів платформи.
Карта, телеметрія, тулбар
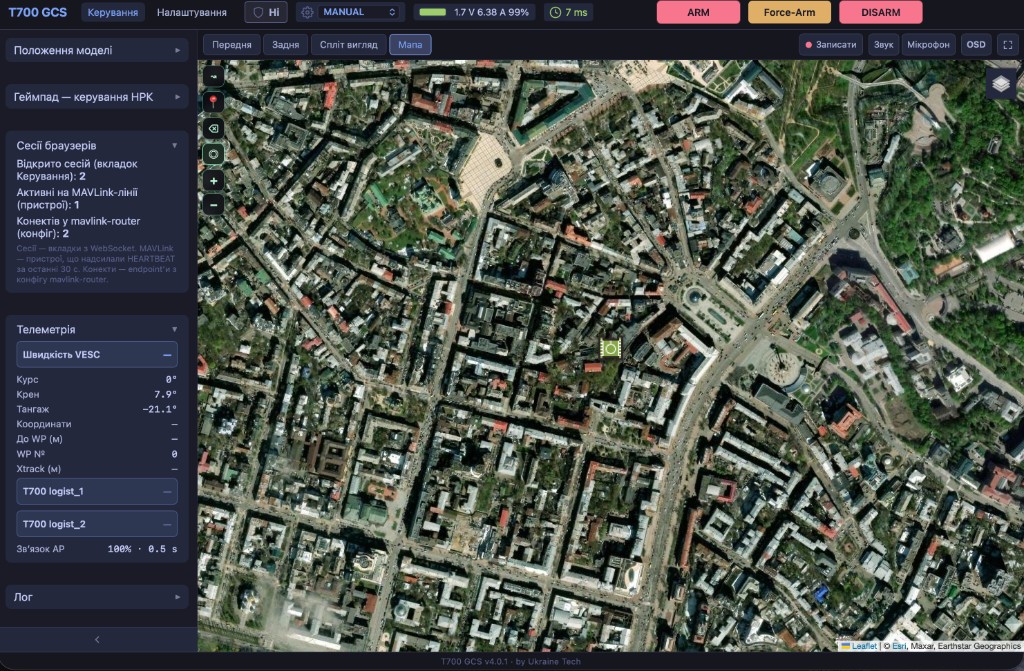
Відео з камери, якість HD/SD/LOW, запис
Розпорошена увага
- Кілька програм і вікон на одну місію
- Налаштування борту — лише фізично, на місці
- Відео, стан, керування — у різних інтерфейсах
- Довга підготовка екіпажу до старту
- Різні сценарії аварії в голові у кожного
- Помилки через перевтомлену увагу, а не через відсутність навичок
Фокус на місії
- Єдиний інтерфейс у браузері — з будь-якого терміналу
- Віддалене налаштування всіх систем НРК з одного місця
- Керування, відео, карта і стан — поруч, без перемикань
- Швидкий вихід на робочий режим після включення
- Вбудована безпека при втраті зв'язку з наземною станцією
- Один сценарій роботи для всього екіпажу
- Інтеграція турелей, РЕБ і сторонніх систем — в одному інтерфейсі
- Мінімум — Raspberry Pi 3 з 1 ГБ; установка на будь-який інший комп'ютер
На що спрямована система
Когнітивне розвантаження
Інтерфейс зібраний навколо циклу «бачити → розуміти → діяти». Статуси, попередження й керування — у передбачуваних місцях, без зайвих кроків.
Єдине віддалене налаштування
Автопілот, BMS, VESC, камери, мережа, периферія — конфігурація й діагностика з однієї наземної станції, без підходу до кожного вузла.
Брендинг під засіб
Назва, оформлення, набір функцій і вотермарки адаптуються під конкретну платформу або підрозділ — система виглядає як ваш засіб.
Місія — в центрі
Відео з низькою затримкою, телеметрія, карта, failsafe — усе підтримує рішення оператора, а не відволікає в технічні деталі.
Модульна інтеграція
Турелі різних типів, РЕБ, спецмодулі — окремі включаємі блоки в одному GCS. Нова комплектація — новий модуль, без перебудови всієї станції.
Максимальна оптимізація
Ядро на Go — компактно й економно по ресурсах. Мінімальний комп'ютер для роботи — Raspberry Pi 3 з 1 ГБ ОЗП; установка можлива на будь-яке потужніше залізо.
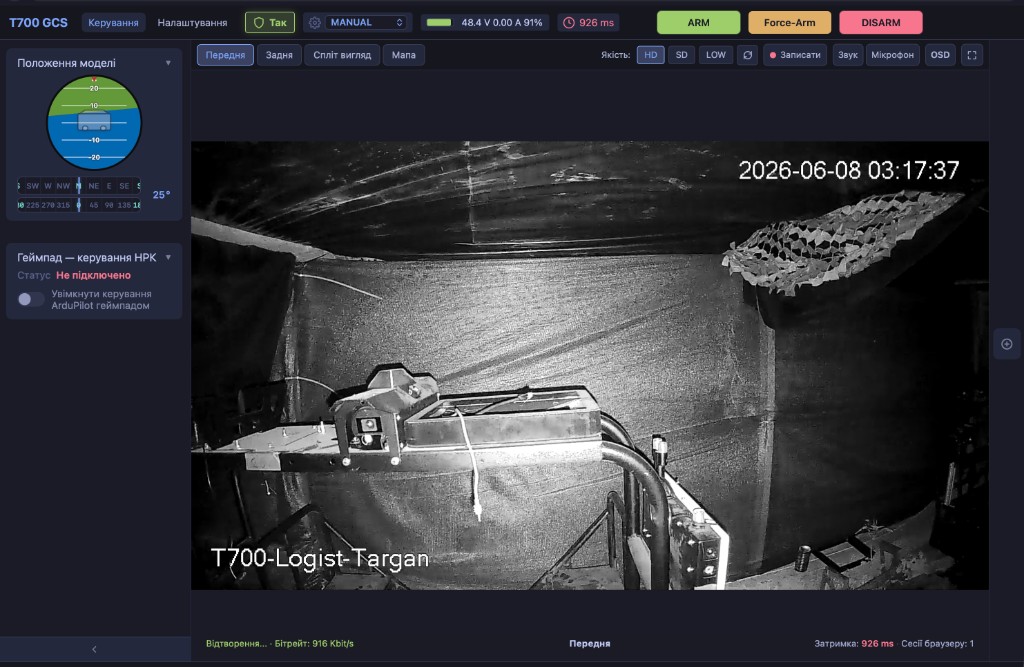
Мінімалістичний OSD — робочий режим оператора
Кнопка OSD переводить «Керування» у режим, де на першому місці — відео з платформи, а не рамки інтерфейсу. Бічні панелі зникають, залишається картина з камер і компактна плаваюча панель знизу: ARM / DISARM, режим, батарея, перемикачі геймпада, звук і мікрофон інтеркому, вибір якості потоку. Оператор бачить те, що відбувається на НРК, і приймає рішення, не відволікаючись на зайві елементи.
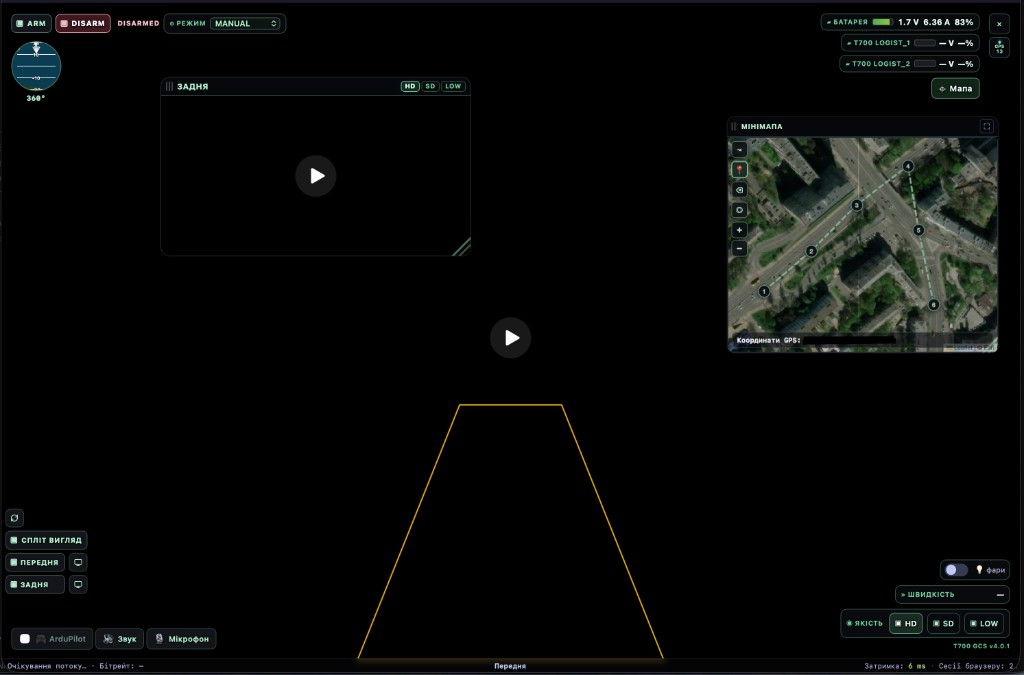
У OSD можна одночасно тримати кілька відеострімів у окремих вікнах — передня камера, задня, спліт або кілька джерел разом. Кожне вікно перетягується на будь-яке місце екрана і змінює розмір розтягуванням — як звичні вікна на робочому столі. Велике основне відео по центру, дві менші камери в куті, мінімапа збоку — оператор сам збирає схему під місію, а не підлаштовується під жорсткий макет програми.
Для кожного потоку окремо — якість HD, SD або LOW. Коли канал зв'язку вузький або затримка зростає, не треба вимикати відео: достатньо знизити якість другорядної камери й залишити головний потік чітким. Так зв'язок розвантажується без втрати огляду — критично при роботі через VPN або на відстані.
У OSD доступні кастомні кнопки (фари, гальма, сервоприводи), мінімапа з позицією платформи — теж у перетягуваному вікні — запис відео в браузер і двосторонній голосовий зв'язок. Розташування вікон зберігається між сесіями: відкрив GCS — екран уже зібраний так, як зручно цьому оператору. Для брендованих засобів — вотермарки назви платформи на тлі OSD, щоб екіпаж одразу бачив, з яким НРК працює.
OSD: кілька відеовікон, зміна якості, перетягування й розтягування
Зручне налаштування керування — кастомні кнопки
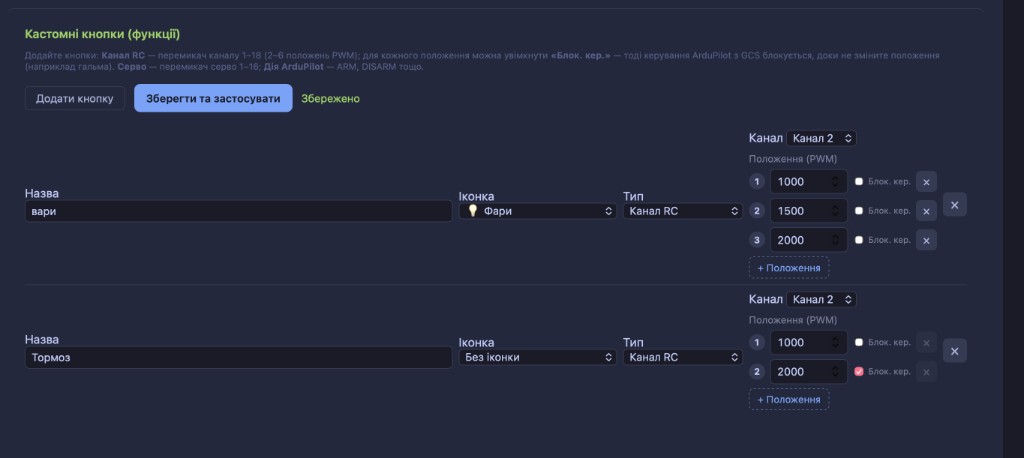
Кожна модифікація НРК має свої вузли: фари з кількома режимами, гальма, сервоприводи, реле, додаткові канали RC. Замість того, щоб вигадувати комбінації на пульті або пам'ятати номери каналів, у T700 GCS створюються кастомні кнопки з багатьма положеннями — прямо в налаштуваннях, без програмування.
Одна кнопка може мати від 2 до 6 положень: наприклад, «Фари» — вимкнено / ближнє / дальнє / строб; «Гальма» — відпущено / утримання / екстрене з автоматичним блокуванням керування рухом у небезпечному стані; «Серво» — кілька фіксованих кутів для механізму на борту. Оператор перемикає режим одним кліком на «Керуванні», на карті або в OSD — не лізе в параметри автопілота під час місії.
Підтримуються типи: канал RC (перемикач PWM на каналах 1–18), сервовиход (серво 1–16) і готові дії автопілота (ARM, DISARM тощо). Для кожного положення задається своє значення PWM або кут серво — наприклад, у «Фар» три режими на 1000 / 1500 / 2000, у «Тормоз» — два, де друге положення блокує рух.
Блокування руху на будь-якому положенні функції. Для кожного з 2–6 положень кнопки окремо вмикається прапорець «Блок. кер.» — не лише для гальм, а для будь-якої функції, де рух НРК небажаний: сервопривід у крайньому положенні, реле в небезпечному стані, проміжний режим фар тощо. Поки активне таке положення, керування ArduPilot з GCS блокується — геймпад і віртуальні стіки не передають команди руху, доки оператор не перемкне функцію в безпечне положення.
Нотифікації для оператора — система не мовчки ігнорує спробу руху. У тулбарі з'являється індикатор «Блок кер.»; на сторінці — помітний банер з назвою функції, що блокує рух; при спробі керувати під блоком — попередження «Зніміть блок!» і спливаюче повідомлення. У OSD — окремий чіп стану, щоб оператор бачив причину блокування навіть на повноекранному відео. Не треба здогадуватися, чому платформа не їде — інтерфейс прямо каже, яку кнопку змінити.
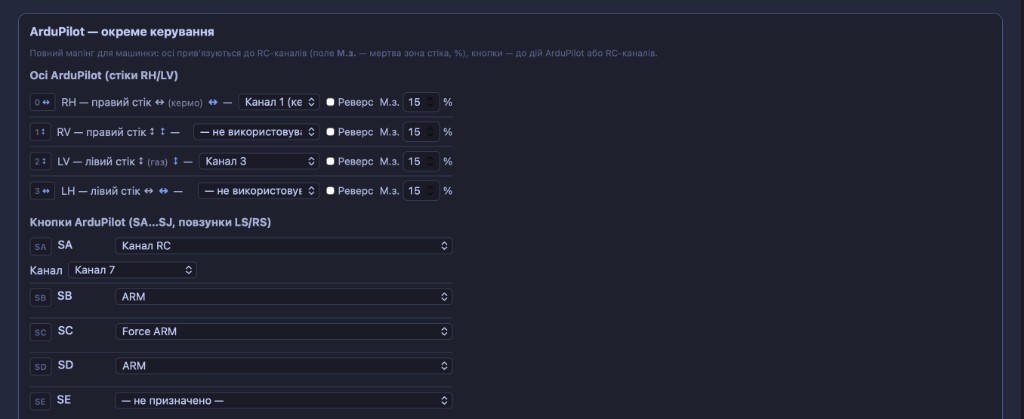
Окремо налаштовується мапінг геймпада: осі стіків на канали керма й газу, кнопки пульта на ARM, Force-ARM або RC-канали, мертва зона стіків — у блоці «ArduPilot — окреме керування». Турель, якщо є на борту, має власний мапінг, щоб наводка не змішувалась з рухом платформи.
Це особливо зручно для виробника з різними комплектаціями: нова функція на борту — нова кнопка в інтерфейсі, без зміни звичного екрану керування для екіпажу.
Кастомні кнопки: фари, тормоз, положення PWM, блок. кер.
Мапінг геймпада: осі, кнопки, канали RC
Мережа та VPN — віддалений доступ до НРК
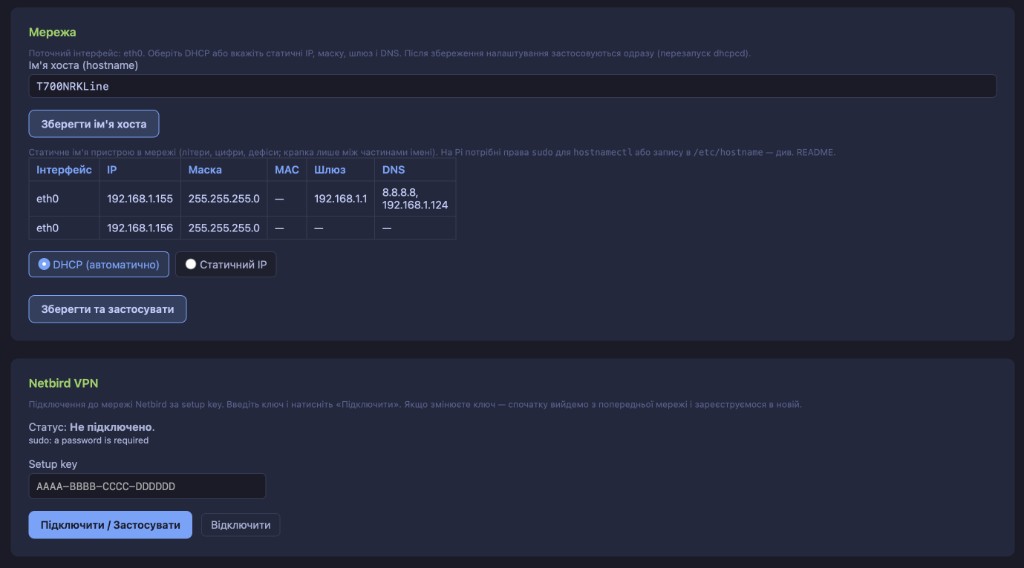
У Налаштування → Мережа зібрано все, що потрібно для підключення до НРК на полігоні й на відстані: hostname, DHCP або статичний IP, огляд інтерфейсів, сканер пристроїв у локальній підмережі — без редагування конфігів у терміналі на борту Raspberry Pi.
Netbird та інші VPN-сервіси. Підтримується підключення до мережі Netbird через setup key прямо з інтерфейсу GCS: увімкнув, вставив ключ, підключив — і НРК доступна з інтернету або з іншої локації за адресою в мережі Netbird. Перше налаштування по Ethernet, далі робота через VPN — типовий сценарій для підрозділу без постійного фізичного доступу до платформи.
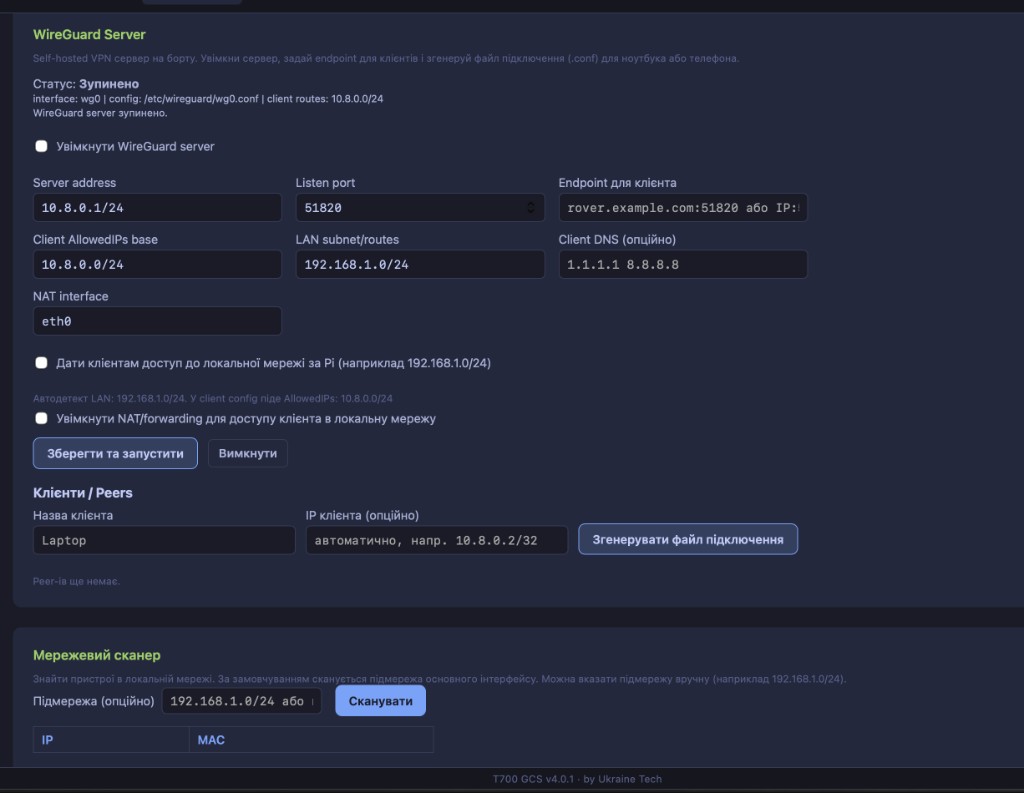
Власний WireGuard Server на борту. Окрім хмарних VPN, T700 GCS дозволяє підняти WireGuard-сервер на самій НРК зі зручним майстром налаштування: адреса сервера, порт, endpoint для клієнтів, доступ до локальної мережі за Pi, DNS — усе в формах, без ручного редагування конфігів у терміналі. Додаєш клієнта (ноутбук, телефон оператора) — система генерує готовий файл підключення для імпорту в WireGuard-клієнт. Свій VPN без залежності від зовнішнього сервісу, коли це потрібно за політикою безпеки або в умовах обмеженого інтернету.
Для техніка — один інтерфейс замість «ssh на Pi + wg + dhcpcd». Для оператора — стабільний віддалений доступ до GCS, відео й телеметрії. Для командира — передбачуваний спосіб дістатися до засобу в парку, де б він не стояв.
Мережа, hostname, Netbird VPN
WireGuard Server, клієнти, генерація .conf
Камери — якість стрімів і парктронік
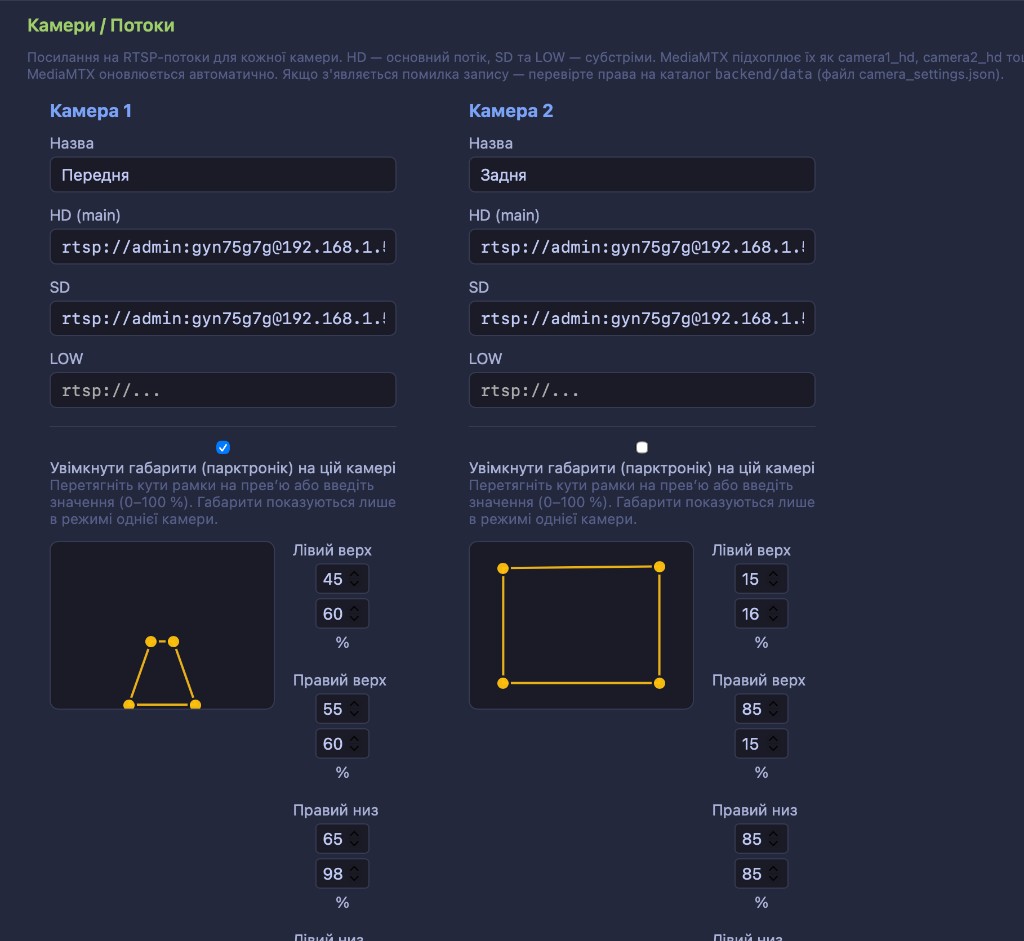
У Налаштування → Камери для кожної камери (передня, задня, додаткові) задаються три рівні якості потоку — HD, SD і LOW. Оператор перемикає їх прямо на «Керуванні» одним кліком; технік налаштовує джерела один раз — і система сама підбирає потрібний стрім під стан каналу. Слабкий зв'язок або VPN на відстані — знижуєш якість другорядної камери, головна лишається чіткою, без обривів і без окремого відеосервера в руках оператора.
Для кожної камери окремо вмикається габарити (парктронік) — рамка на відео, що показує габарити платформи й допомагає орієнтуватися при русі задом або в тісному просторі. Кути рамки перетягуються на прев'ю або задаються точними відсотками по кожному куту — під кут огляду конкретної камери на вашій НРК. Налаштування зберігається на борту; оператор одразу бачить результат у режимі однієї камери на «Керуванні».
Передня й задня камери, спліт-вигляд і перемикання в OSD — все зібране навколо однієї конфігурації. Не треба калібрувати парктронік у сторонній програмі і окремо підключати RTSP-потоки — технік зробив один раз дистанційно, екіпаж користується готовим оглядом.
Камери: HD/SD/LOW, парктронік, калібрування рамки
BMS — телеметрія й віддалене налаштування
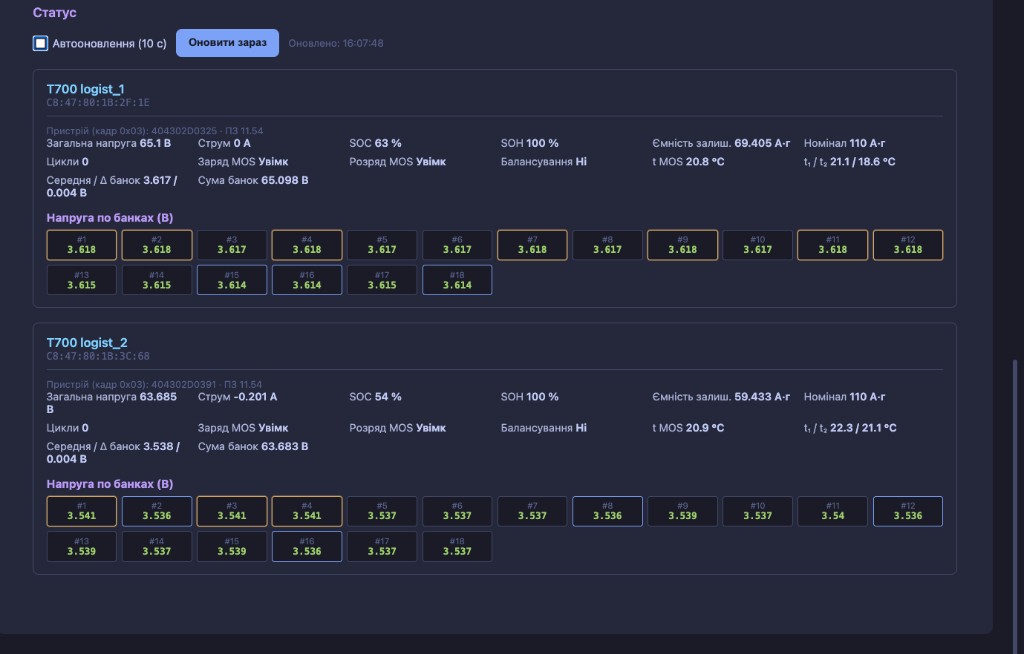
Батарея НРК — не «чорна скринька» з одним відсотком у тулбарі. У Налаштування → BMS система зчитує телеметрію з бортових BMS по бездротовому зв'язку і показує її дистанційно — для однієї або кількох батарей на платформі одночасно.
Жива телеметрія: загальна напруга й струм, заряд (SOC), здоров'я (SOH), залишкова й номінальна ємність, температури, стан заряд/розряд MOS і балансування, напруга кожної банки окремо з підсвіткою розбросу. Автооновлення раз на хвилину або вручну — технік і оператор бачать реальний стан акумулятора, не підходячи до НРК і без окремого BMS-додатку на телефоні.
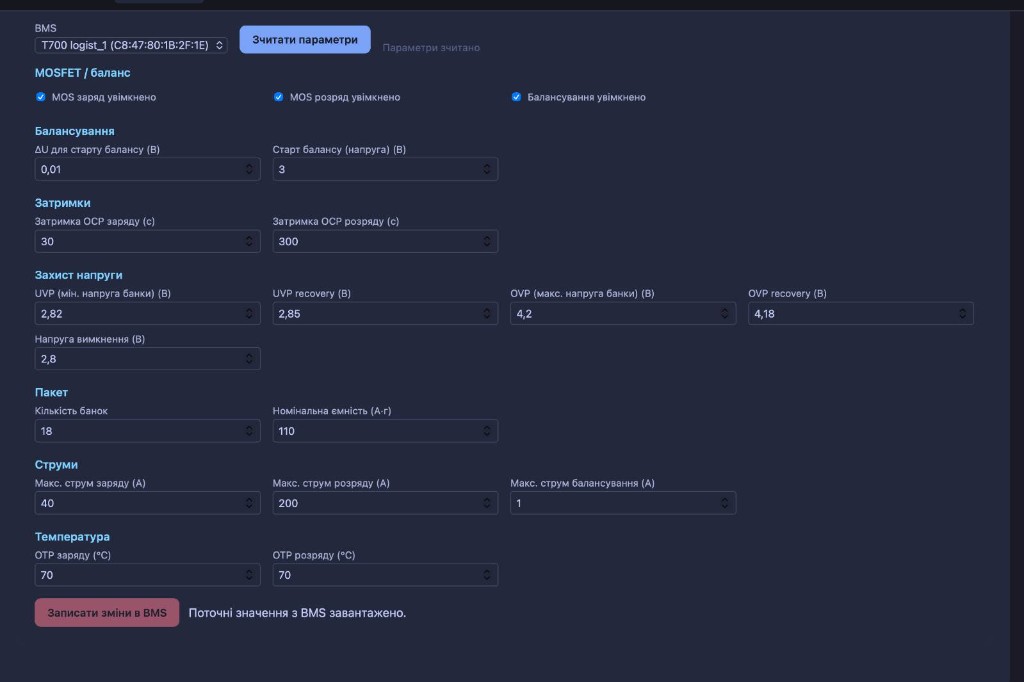
Віддалене налаштування параметрів BMS: зчитати поточні значення з борту, змінити пороги захисту (напруга, струм, температура), балансування, кількість банок, номінальну ємність, затримки спрацьовування — і записати зміни назад у BMS з того ж інтерфейсу. Підготовка батареї до виїзду, зміна лімітів під нову комплектацію або діагностика після місії — без фізичного доступу до контролера на платформі.
Для екіпажу це означає: стан енергії видно там же, де керування й відео; для техніка — повний цикл «прочитав → налаштував → записав» без другого інструменту. BMS і GCS — одна система, а не паралельні програми.
Телеметрія BMS: напруга, SOC, банки
Параметри BMS: захист, баланс, запис на борт
VESC — пряма телеметрія приводу
Для платформ на контролерах VESC T700 GCS отримує пряму телеметрію з приводу — не через автопілот і не через окрему програму на ноутбуці. У Налаштування → Система → Панель або в розділі USB Forwarding / VESC відображаються дані з кожного підключеного контролера в реальному часі.
Що бачить оператор і технік: напруга й струм батареї та мотора, оберти, навантаження (duty), а головне — температура MOSFET контролера і температура двигуна. Це дозволяє вчасно помітити перегрів на довгому русі, під навантаженням або в спекотну погоду — і зупинити місію або знизити режим до виходу приводу з ладу.
Кілька VESC на одній НРК (наприклад, окремі приводи) — окремі блоки телеметрії з назвою й портом. Дані оновлюються автоматично; стан приводу поруч із BMS, автопілотом і відео — один екран для контролю «здоров'я» платформи, а не розкидані індикатори по різних утилітах.
Для підрозділу це профілактика: менше несподіваних відмов моторів і контролерів в полі, швидша діагностика «чому гріється» без розбирання борту.
VESC: напруга, струм, темп. FET, темп. мотора

Брендинг під конкретний засіб
T700 GCS не виглядає як «чужий софт, який поставили на борт». Система підлаштовується під конкретну платформу, серію або підрозділ: змінюється назва в інтерфейсі, вотермарки в відеорежимі, набір видимих функцій і спрощений режим для польових терміналів.
Для підрозділу це означає впізнаваний інструмент «свого» засобу. Для оператора — менше плутанини між різними НРК в парку. Для командування — єдиний стандарт роботи з різними модифікаціями в рамках однієї наземної станції.
Модульна архітектура та інтеграція з іншими системами
T700 GCS спроєктована не як закритий моноліт для однієї конфігурації НРК, а як модульна платформа, до якої можна підключати обладнання різних виробників і призначення. Турельні комплекси, системи РЕБ, додаткові камери, реле, приводи, датчики та інші бортові вузли — інтегруються в єдиний робочий інтерфейс оператора, а не залишаються окремими «островами» з власними пультами й програмами.
Для виробника платформи це означає швидке підключення нового обладнання: не місяці написання окремого GCS під кожну модифікацію, а розширення вже готової системи новим модулем — керування, статус, налаштування й діагностика з'являються там, де оператор і так працює. Для підрозділу — один стандарт взаємодії з різними засобами в парку, навіть якщо склад обладнання на борту відрізняється.
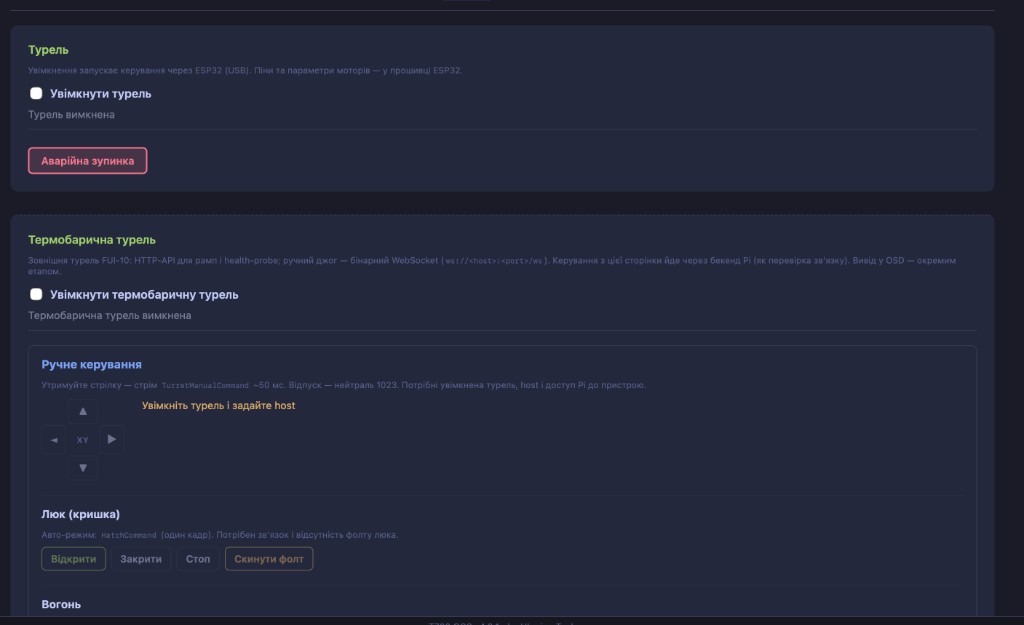
Турелі та бойові модулі — окремі включаємі блоки. На одній НРК можуть одночасно існувати різні типи озброєння й спецобладнання — класична турель на бортовому контролері, термобаричний модуль іншого виробника, прицільний блок, реле. Кожен модуль увімкнюється окремо в налаштуваннях: на платформі без турелі блок просто вимкнений і не займає місце в інтерфейсі оператора. На іншій комплектації — ті самі налаштування, інший набір увімкнених модулів.
У Налаштування → Турель для кожного типу — свій блок керування: увімкнення, аварійна зупинка, ручна наводка, керування люком, скидання збою, дії вогню — залежно від можливостей модуля. Після збереження віджет з'являється на «Керуванні»; для геймпада — окремий мапінг, щоб наводка не змішувалась з кермом і газом. Оператор не перемикається між програмами — рух платформи і робота з модулем в одній наземній станції.
Системи РЕБ, додаткові камери, реле, датчики та обладнання сторонніх виробників підключаються за тим самим принципом: новий вузол — новий модуль у налаштуваннях і на панелі оператора, без переписування ядра GCS. Статус, керування й діагностика дистанційно, поруч із телеметрією НРК. Не потрібен окремий термінал на кожен тип системи.
Для виробника це швидкий вихід модифікації: базова НРК + опційна турель + опційний спецмодуль — один GCS, різні комплектації. Для підрозділу — один сценарій навчання оператора, навіть якщо в парку різний склад бортового обладнання.
Модулі турелей: класична, термобарична, ручне керування
Група НРК, автоматизація маршрутів і аналітика відео
У розробціT700 GCS розвивається не лише як пульт однієї машини, а як платформа для роботи з парком НРК — коли на місії одночасно кілька платформ, ретранслятор або дрон-ретранслятор у повітрі. Наведені нижче можливості зараз у розробці і входять до дорожньої карти системи — не всі ще доступні в поточній версії.
Об'єднання НРК в одній мережі
Кілька НРК в єдиній мережі обміну телеметрією: оператор бачить стан усіх платформ, перемикається між ними в одному інтерфейсі — без окремого GCS на кожну машину. Якщо будь-яка НРК втратила прямий зв'язок, підключення можливе через іншу НРК у зоні або через дрон з ретранслятором — ретрансляційний контур вбудований у логіку системи, а не збирається вручну на місії.
Маршрут на основі лідара
Побудова маршруту за даними лідара для повторюваних місій: платформа один раз проходить ділянку зі скануванням рельєфу і перешкод, маршрут зберігається і наступного разу виконується автоматично — без щоразового ручного накладання waypoints. Зручно для логістики, патрулювання постійних маршрутів і регулярних завдань на тій самій території.
Детекція ждунів на основі ШІ (YOLO)
Аналіз відео з бортових камер нейромережами YOLO для виявлення ждунів у зоні огляду. Обробка йде в контурі GCS разом із відеопотоком оператора — без окремої системи на ноутбуці. Для стабільної роботи потрібні якісні камери НРК (достатня роздільність і картинка в HD); на слабкому потоці точність детекції падає, тому в комплектації закладено вимогу до відео на борту.
Оптимізоване ядро — від мінімального заліза до будь-якого іншого
T700 GCS спроєктована не лише зручною для оператора, а й максимально оптимізованою для бортового комп'ютера. Серверна частина написана на Go — один компактний виконуваний модуль без важкого рантайму, з низьким споживанням пам'яті і передбачуваною поведінкою під навантаженням. Це не «набір скриптів на борту», а цілісне оптимізоване ядро, розраховане на роботу в полі роками.
Raspberry Pi 3 з 1 ГБ оперативної пам'яті — це саме мінімальний комп'ютер, на якому система працює. Не рекомендована конфігурація «для економії», а нижня межа: якщо на борту лише таке залізо, T700 GCS все одно запускається і виконує повний функціонал наземної станції. Не потрібен потужний міні-ПК на кожній платформі — менше вартості комплектації, тепла й місця в корпусі.
При цьому система не прив'язана лише до Raspberry Pi 3. Установка можлива на будь-який інший сумісний комп'ютер — Raspberry Pi 4 або 5, інші одноплатники на Linux, промисловий міні-ПК, настільний або польовий термінал на x86_64. Той самий GCS, той самий інтерфейс — різне залізо залежно від бюджету, корпусу і вимог до запасу потужності на борту.
Для виробника це гнучкість комплектації: базова партія — на мінімальному Pi 3, преміум-модифікація — на потужнішому обчислювачі без зміни софту. Для підрозділу — стабільна робота на тому, що вже стоїть на машині. Для техніка — однакова логіка установки незалежно від обраної платформи.
Що отримує оператор на практиці
Один екран замість хаосу. Керування платформою, відео з низькою затримкою, карта з позицією й треком, штучний горизонт, лог подій, геймпад і кастомні функції — на одній сторінці. Оператор не витрачає увагу на пошук «де зараз батарея» чи «чому не видно відео».
Кастомні кнопки й безпека руху. Фари, гальма, сервоприводи — кнопки з кількома положеннями; на будь-якому з них можна увімкнути блокування руху. Оператор одразу бачить банер, індикатор у тулбарі і попередження при спробі керувати — без здогадок, чому НРК стоїть.
Камери й парктронік з коробки. Три рівні якості стріму на камеру, калібрування габаритної рамки на прев'ю — налаштовується дистанційно, працює на «Керуванні» й в OSD без зайвих інструментів.
OSD під слабкий зв'язок і складну місію. У мінімалістичному OSD — кілька відеострімів у вікнах, які можна вільно розміщувати на екрані й змінювати розмір розтягуванням. Якість кожного потоку перемикається окремо (HD / SD / LOW), щоб розвантажити канал, не втрачаючи огляд з усіх потрібних камер.
BMS на відстані. Телеметрія по кожній банці, SOC, температури — і повне налаштування параметрів BMS з записом на борт: без окремого додатку і без доступу до акумуляторного відсіку.
VESC — контроль перегріву приводу. Пряма телеметрія з контролера: температура MOSFET і двигуна, струми, оберти — щоб вчасно зупинити перегрів і не втратити привід у місії.
Група НРК і ретрансляція у розробці. Обмін телеметрією в одній мережі, перемикання між платформами, доступ через сусідню НРК або дрон-ретранслятор, якщо прямий зв'язок обірвався.
Лідар і повторювані місії у розробці. Маршрут за знімком лідара — автоматизація постійних виїздів без ручного планування кожного разу.
Детекція ждунів на YOLO у розробці. Аналіз відео з камер НРК нейромережами YOLO у контурі GCS; для надійної роботи — якісні бортові камери та стабільний HD-потік.
VPN і віддалений доступ. Netbird з інтерфейсу GCS, власний WireGuard Server на борту з генерацією конфігу для клієнта — без ssh і ручних мережевих файлів на Pi.
Підготовка і діагностика на відстані. Перед виїздом технік може перевірити зв'язок з автопілотом, стан BMS, параметри VESC, камери й мережу — не відкриваючи корпус і не підключаясь до кожного пристрою окремо. Після місії — той самий інтерфейс для розбору логів і стану систем.
Турелі, РЕБ і спецмодулі — модульно, в одному інтерфейсі. Класична турель, термобаричний модуль, РЕБ, реле — кожен увімкнюється окремо, керується з «Керування» й налаштувань. Окремий мапінг геймпада, аварійна зупинка, без другого монітора й другого софту.
Швидка інтеграція для виробника. Модульна архітектура дозволяє дуже швидко вивести в GCS нове обладнання — свого або стороннього виробника: керування, моніторинг і віддалене налаштування з'являються в існуючому інтерфейсі без розробки окремої наземної станції під кожну модифікацію НРК.
Безпека без окремого сценарію в голові. Якщо зв'язок браузера з наземною станцією обривається, система переходить у безпечний режим: нейтраль кермування й газу, безпечний режим автопілота, за налаштуванням — передача керування на фізичний RC-пульт. Оператор не змушений вручну згадувати послідовність дій — вона вже закладена в систему.
Робота з будь-якого терміналу. Ноутбук, планшет, польовий термінал, Steam Deck — інтерфейс у браузері, без встановлення важкого клієнта. Один екіпаж — одна логіка роботи, незалежно від того, хто сів за пульт.
Легкий борт — або потужніше за потреби. Мінімальний комп'ютер для роботи системи — Raspberry Pi 3 з 1 ГБ ОЗП; на ньому GCS запускається повноцінно. Але установка можлива і на будь-який інший сумісний хост — від новіших Pi до промислового ПК — без переробки інтерфейсу й логіки роботи оператора.
Перевірено в підрозділах. T700 GCS проходила реальну експлуатацію в бойових і навчальних умовах — не як демонстрація на столі, а як щоденний інструмент екіпажів, яким потрібні стабільність, передбачуваність і мінімум зайвих дій під тиском обставин.
Система виникла з практики роботи з НРК серії Т-700: зрозуміло, що оператору потрібно в полі, що техніку — для дистанційної підготовки, і що командиру — для впевненості, що екіпаж працює в одному стандарті.
T700 GCS — менше рутини,
більше місії
Наземна станція, яка забирає на себе технічний шум, розпорошену увагу й ручну збірку інструментів — і повертає оператору головне: бачити ситуацію й виконувати завдання.
Єдиний інтерфейс. Віддалене налаштування всіх систем. Модульна інтеграція турелей, РЕБ і обладнання інших виробників. У розробці: група НРК, ретрансляція, маршрути за лідаром, детекція ждунів на YOLO. Ядро на Go: мінімум — Pi 3 з 1 ГБ, установка на будь-який інший комп'ютер. Брендинг під ваш засіб. Перевірено там, де помилка коштує не часу налаштування, а результату місії.
T700 GCS · наземна станція керування НРК · NRK